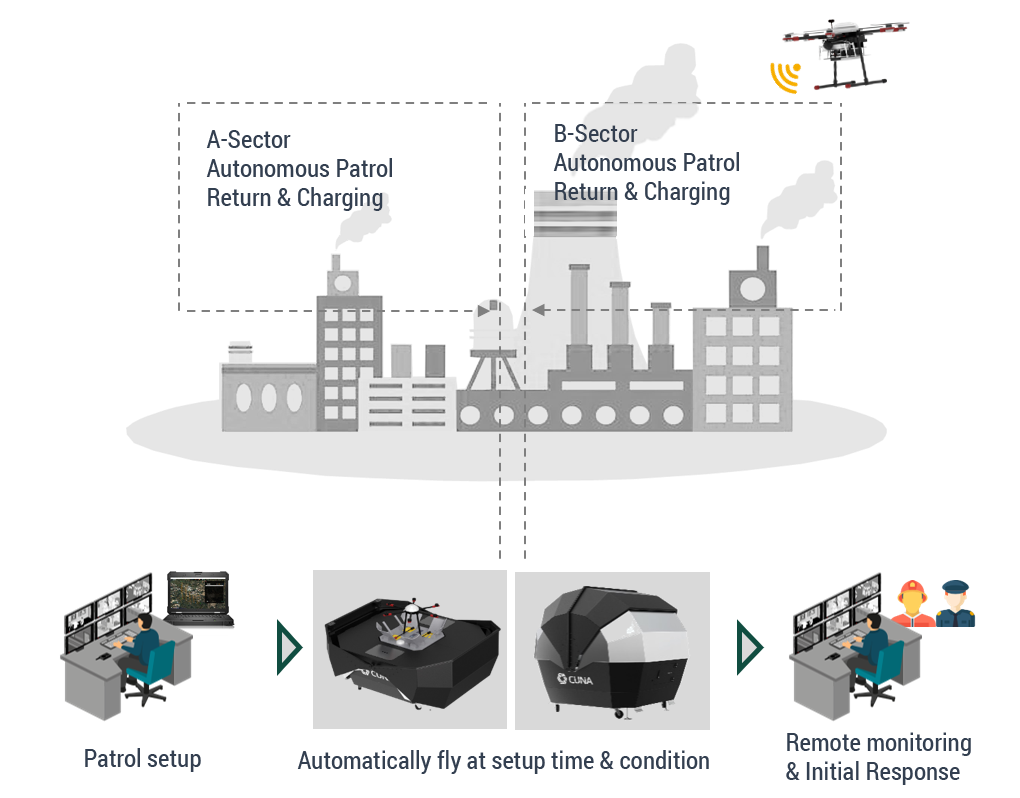
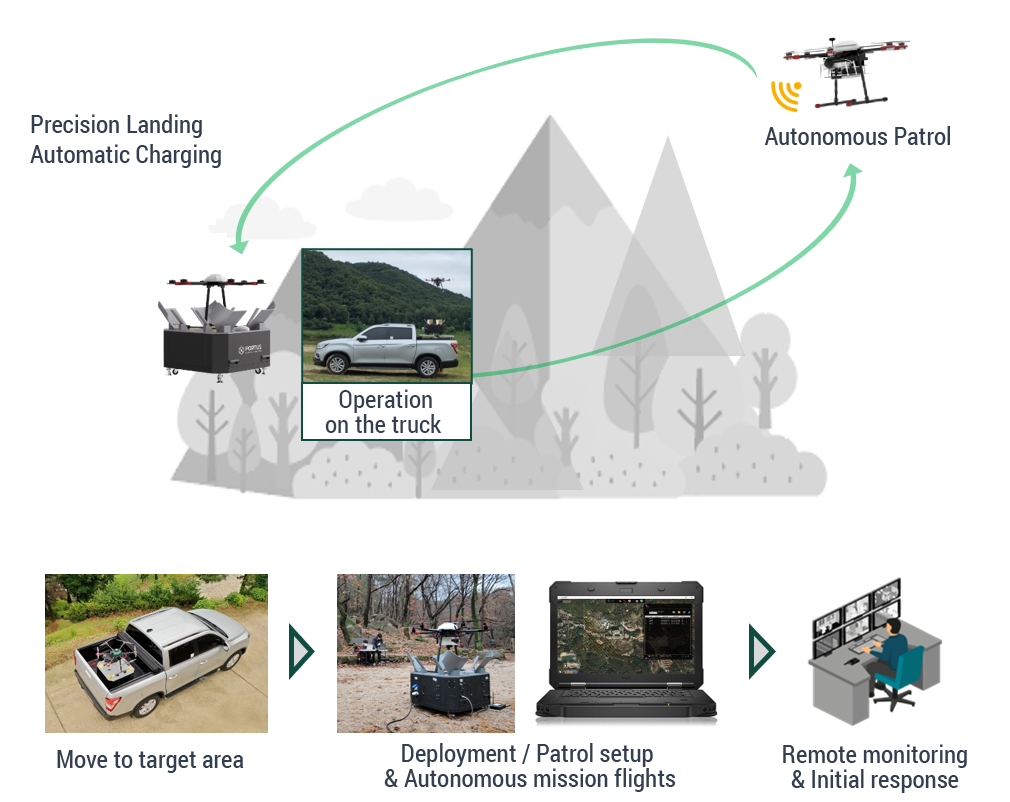
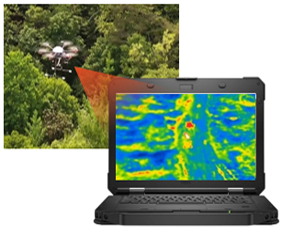
ドローンステーション ドローンステーションとは? ドローン自動運転システムの中核、ドローン自動充電ステーション > ドローンステーションとは? ドローン自動運転システムの中核、ドローン自動充電ステーションドローンステーションはドローン自動運用プラットフォームであるRONDO Mobility Systemと連動し、ドローンの自動充電および自動離着陸をサポートする装備です。ドローンステーションは、ドローンを活用して連続的に繰り返し自動飛行任務を遂行しようとする産業現場に不可欠な要素であり、複数のステーション活用時復帰飛行距離を考慮せずにより広い距離の飛行を可能にし、ドローンの制限された飛行時間と距離を実質的に克服する手段です。また、人がバッテリーを直接交換する手間をかけずにドローン操作の全プロセスを自動化できるように克服する効率的なドローン操作ソリューションです。ドローンステーションは、運用環境と導入目的に応じて固定型と移動型の2種類に分けられます。 > 固定ステーション CUNA2.0 固定式ステーションCUNA2.0はドローンを格納し、屋外環境に直接配置して運営できます。ドローン格納式ドーム構造/上部開閉式自動充電と精密着陸をサポート装備内部の冷・暖房機能をサポートサイズ: 1135 x 1080 x 1082mm重さ:約170kg電源:220V単相(13A)充電電力:最大700W充電時間:50分以内精密着陸: Landing Beaconポジショニング: Dual-GPS防水防塵:IP43 > 固定式ステーションCUNA 固定式ステーションCunaはドローンを格納し、屋外環境に直接配置して運営できます。ドローン格納式ドーム構造/上部開閉式サイズ:1800×1800×1600mm重量:約400kg電源:220V単相(5〜6A)充電電力:最大700W充電時間:50分以内精密着陸: Landing Beaconポジショニング: GPS防水防塵:IP43 > 移動式ステーションPORTUS 移動式ステーションPortusは車両に積載され、好きな場所で操作できます。移動しやすい軽量ステーションサイズ:700 x 700 x 300mm重量:45キロ充電モジュール:有線充電式電源:220V単相(5〜6A) 充電電力:最大700W充電時間:50分以内精密着陸: Landing Beaconポジショニング: GPS > DIB Service Using outdoor fixed deployment type Regular patrol area surveillance Summary of Operation Scenarios Placement of stationsDetermine the number of stations needed by considering the control rangeApply the CUNA model suitable for outdoor environments Autonomous patrol setupSet flight start time and trigger parameters (timer, charging)Enable automatic continual patrol by setting multiple courses simultaneously Target sector & object monitoring Real-time video monitoring Real-time streaming service to mobile devices Event detection and initial responseDetection and notifications alertSecurity and disaster management with related public institutions Other Applications Accident prevention activities at routine patrol areasHazardous substance detection in industrial complexesDay and night monitoring at main public facilities, farms, etc. > DIB Service Using Portable type Non-routine Patrol Area Surveillance Summary of Operation Scenarios Moving to target areaLoad portable DIB on truck and move to target areaPlace it at station (Portus, on an available truck) Mission flight setupPlan mission with GCS (argosALES)Set patrol and trigger (timer, charging) Autonomous patrol flightAutonomous take-off, flight, return, landing, and chargingReal-time video monitoring Remote monitoring at surveillance centerIntegrated with the video monitoring systemIncidents management with related public institutions Other Applications Infrastructure inspection and data managementInitial investigation, search for survivors, and security patrolAccident prevention activities at accident black spots > Scenario - DIB Service Using Portable type A distress search scenario 1 Drone / Station / GCS Portable power bankDIB Stand by 2 Check distress areasIncident registration 3 Move to search location and parkMove to target area 4 Set up patrol with argosALES / Utilize Survey Mode Patrol mission planning 5 Operate directly from the truck 1st Patrol 6 Use the EO/IR gimbal camera Monitor at GCS and Center Monitoring 7 Autonomous return and charging Landing and charging 8 2nd autonomous patrol after completing charge2nd Patrol or move to another area 9 Check event and coordinatesMonitoring and event detection 10 Check info and take initial action DIB mission complete Initial action